Summary
Reconstructing unknown external source functions is an important perception capability for a large range of robotics domains including manipulation, aerial, and underwater robotics. In this work, we propose a Physics-Informed Neural Network (PINN) based approach for solving the inverse source problems in robotics, jointly identifying unknown source functions and the complete state of a system given partial and noisy observations. Our approach demonstrates several advantages over prior works (Finite Element Methods (FEM) and data-driven approaches): it offers flexibility in integrating diverse constraints and boundary conditions; eliminates the need for complex discretizations (e.g., meshing); easily accommodates gradients from real measurements; and does not limit performance based on the diversity and quality of training data. We validate our method across three simulation and real-world scenarios involving up to 4th order partial differential equations (PDEs), constraints such as Signorini and Dirichlet, and various regression losses including Chamfer distance and L2 norm.
Softbody
We demonstrate how our method effectively handles a highly ill-posed inverse problem given partial and noisy observations. This example deals with a softbody system interacting with a rigid terrain with unknown geometry. The goal is to predict 1) a full deformed softbody geometry and 2) contact pressure, given wrist wrench and partial/noisy segmented pointcloud.


[Left] Partial pointcloud measurement. [Middle] reconstructed deformed geometry where the color represents predicted contact pressure ranging from 0 to 4,000Pa. [right] estimated contact location (red) overlaid with the ground truth (blue).
Membrane Sensor
This example emphasizes the capacity of our method to solve high-order and complex differential equations’ inverse source problems. This example deals with a membrane system interacting with a rigid object with unknown geometry. The goal is to predict membrane sensor’s contact pressure, given partial/noist pointcloud and the sensor’s pressure readings.
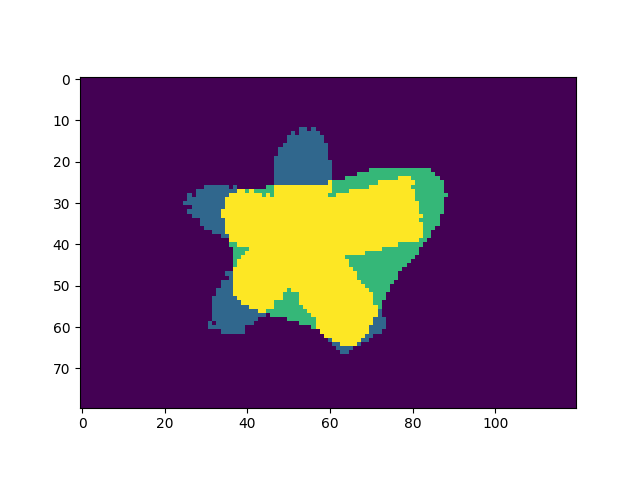
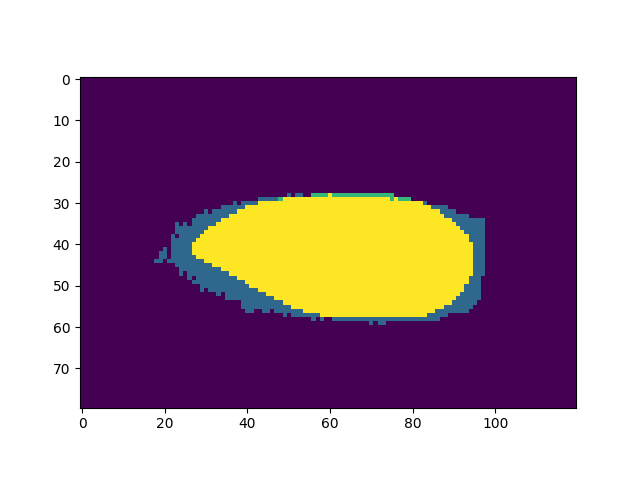
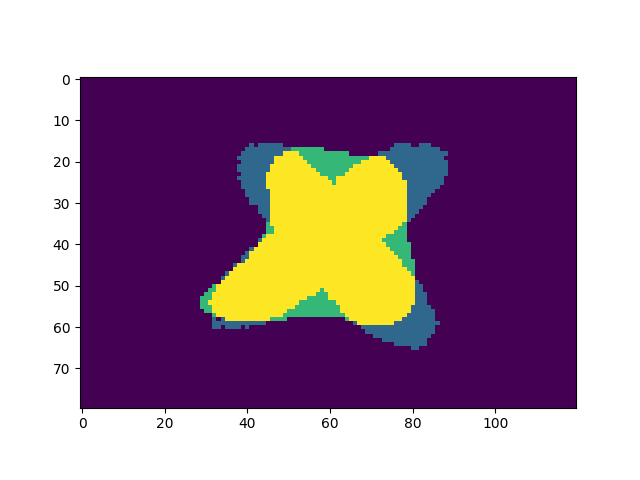
[Top] Visualization of real-world Soft Bubble and object (pink) interactions. The Soft Bubble is from our model’s reconstruction, and the color indicates our model’s contact pressure prediction. At the top of the figure, we show wrist wrench’s ground truth (gt) and estimation from our model (est). [Bottom] Contact location estimation. Yellow region is the overlap between the ground truth and the estimated contact patch, blue is false negative, and green is false positive
- In 5th Conference on Robotic Learning (CoRL 2024), Munich (poster)
Authors




Citation
@inproceedings{wineural,
title={Neural Inverse Source Problem},
author={Wi, Youngsun and Oller, Miquel and Lee, Jayjun and Fazeli, Nima},
booktitle={8th Annual Conference on Robot Learning}
}