Let’s assume we have a rigid-body system (for example a robotic manipulator) making and breaking contact with the environment. How can we infer physical properties such masses, inertias, and contact properties simultaneously with contact forces? Most importantly, how can we infer these properties without breaking the trajectory into contact-free and contacting segments and individually studying each? Is there a way in which we can consider the full trajectory of the system including contacts in one framework? In ISRR 2015 and IJRR 17, we show how this is possible by formulating a nonlinear optimization program using LCP constraints and rigid-body dynamics. We show what parameters, if any, are identifiable given sensory observations with empirical evaluation on an impact data-set.
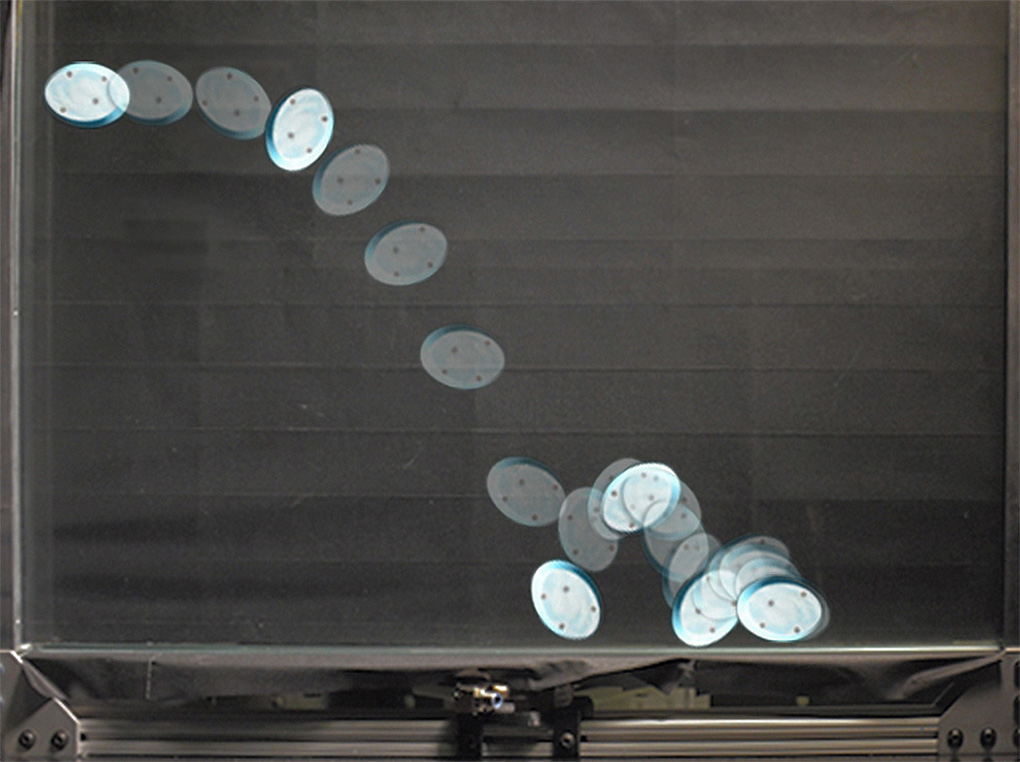
Our inferences and predictions rely on the quality of the models we use. Rigid-body contact models are extremely important to predicting, planning, and control of robotic interactions and serve as the foundations of many simulators. However; how good are these models in practice and what are their key failure modes? Outlining where and when a model is useful is important to effective robotic manipulation. We have studied the fidelity of these models for Planar Pushing (ICRA 16), and impactful contact (ICRA 17), and demonstrated fundamental limitations for impactful contact (ISRR 17).