Abstract
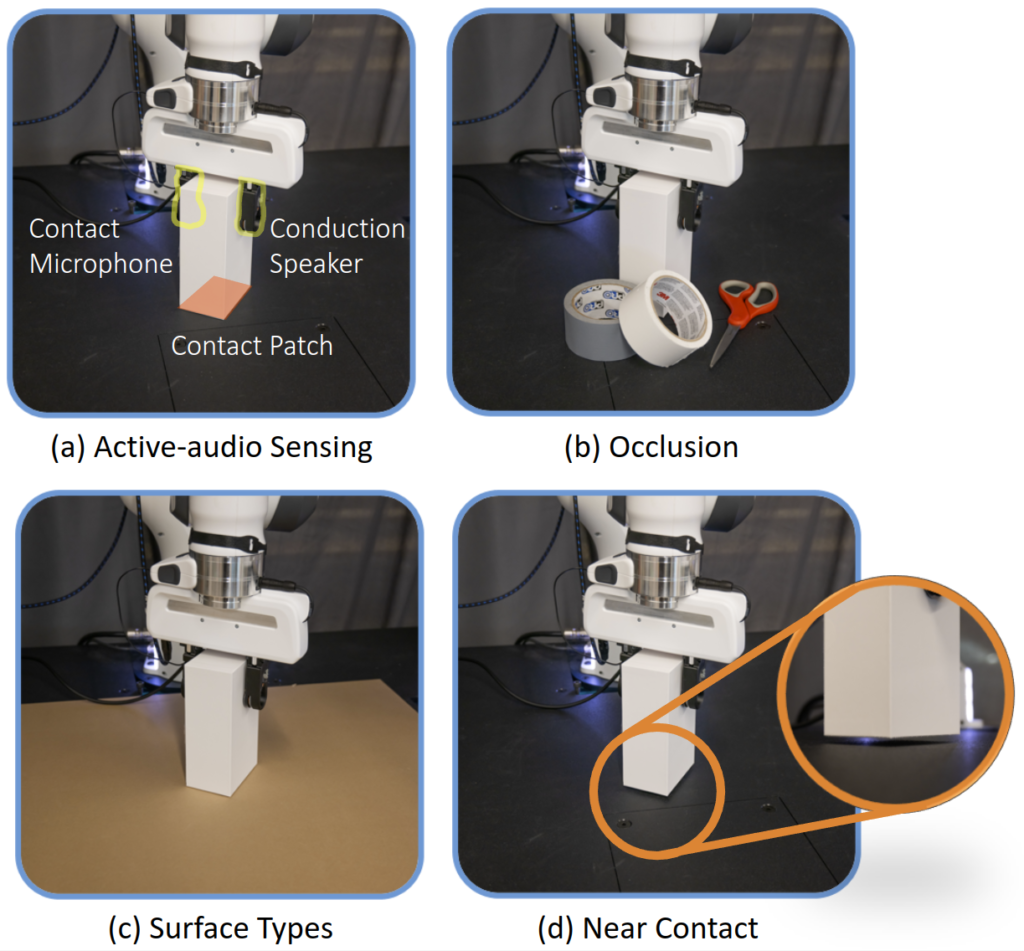
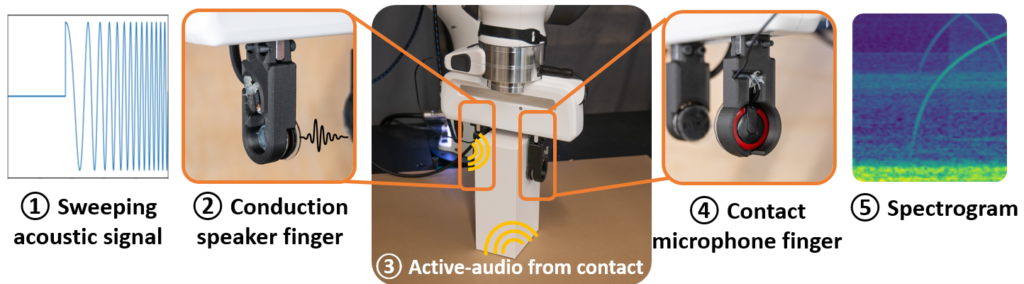
Estimating contact locations between a grasped object and the environment is important for robust manipulation. In this paper, we present a visual-auditory method for extrinsic contact estimation, featuring a real-to-sim approach for auditory signals. Our method equips a robotic manipulator with contact microphones and speakers on its fingers, along with an externally mounted static camera providing a visual feed of the scene. As the robot manipulates objects, it detects contact events with surrounding surfaces using auditory feedback from the fingertips and visual feedback from the camera. A key feature of our approach is the transfer of auditory feedback into a simulated environment, where we learn a multimodal representation that is then applied to real world scenes without additional training. This zero-shot transfer is accurate and robust in estimating contact location and size, as demonstrated in our simulated and real world experiments in various cluttered environments.
Video
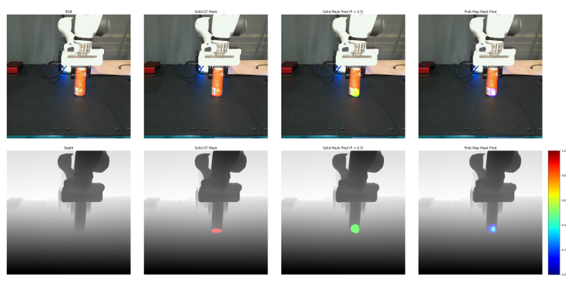
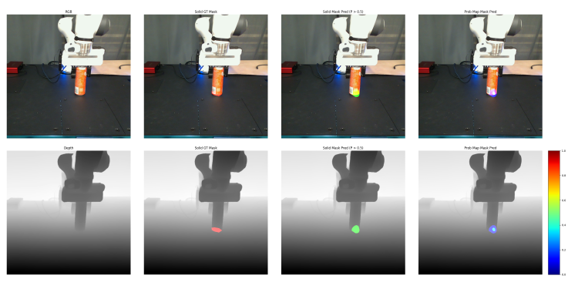
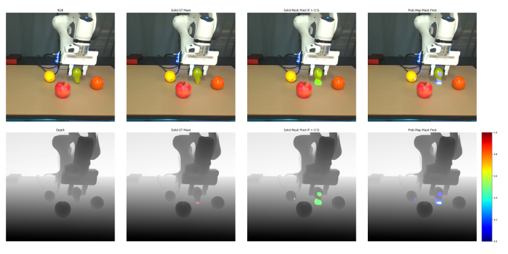
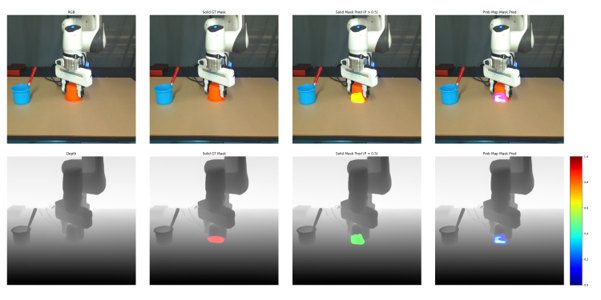
Results
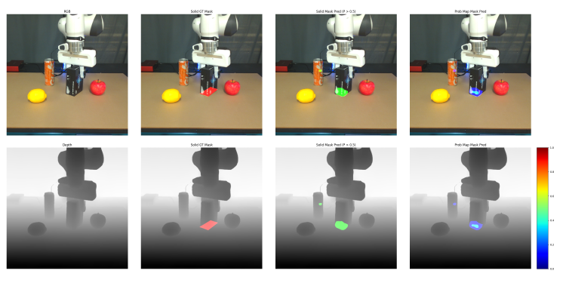
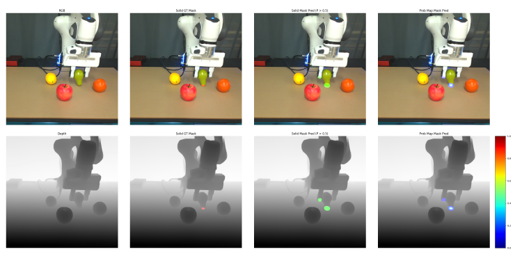
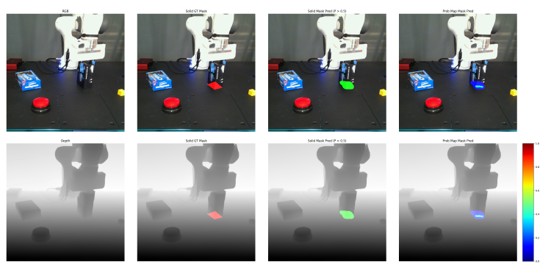
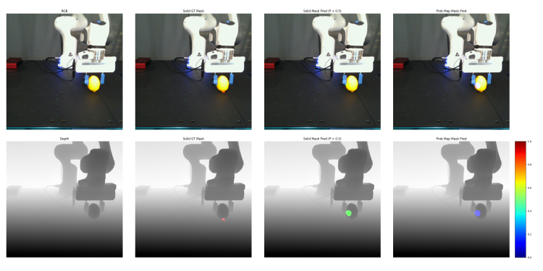
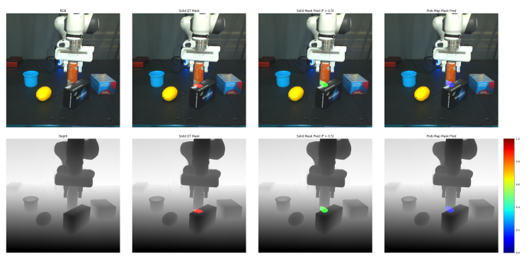
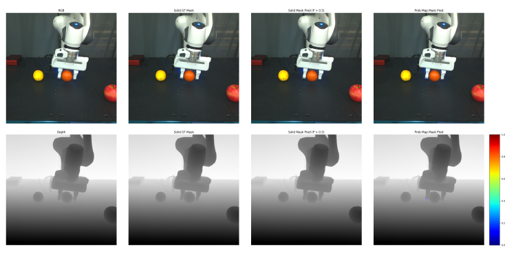
- General cases
Our model:
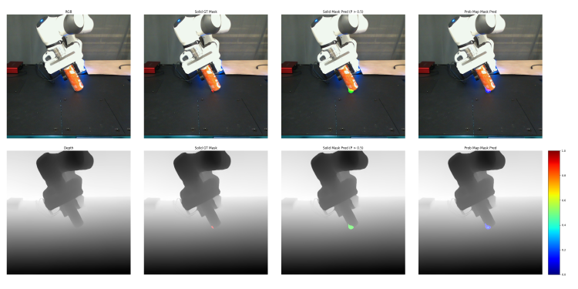
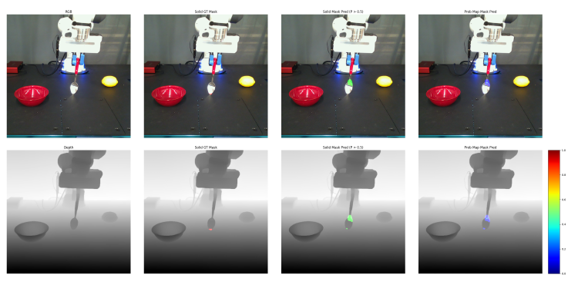
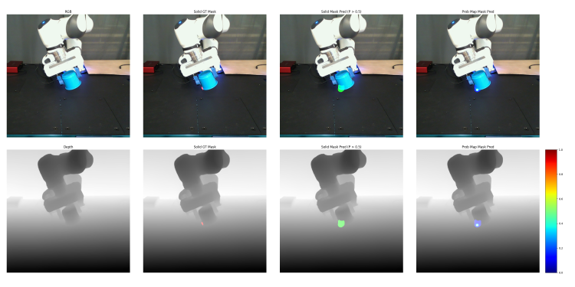
w/o audio:
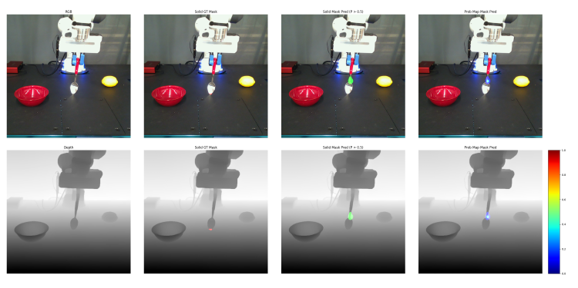
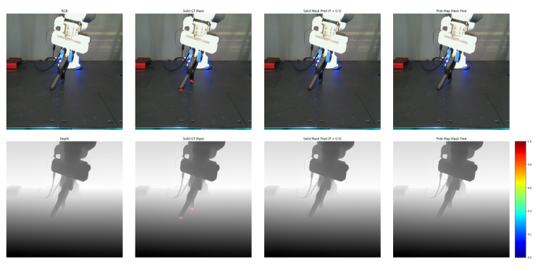
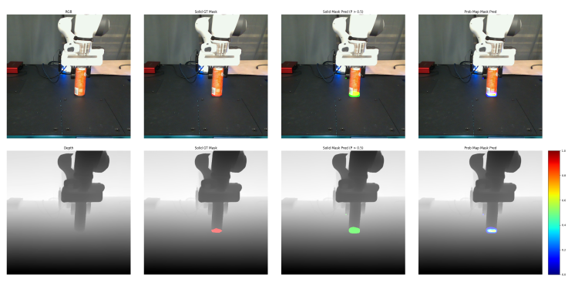
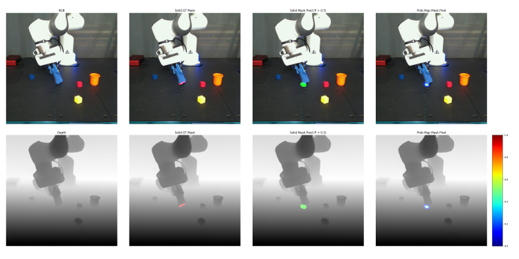
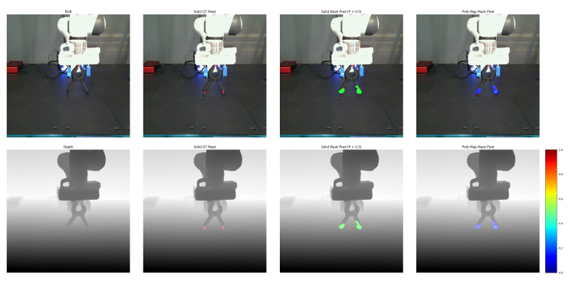
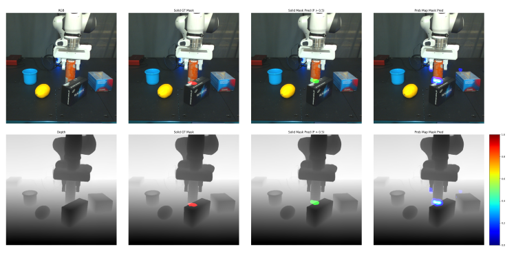
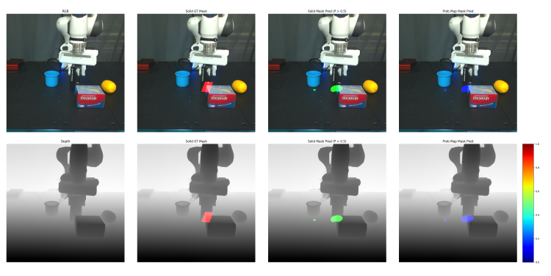
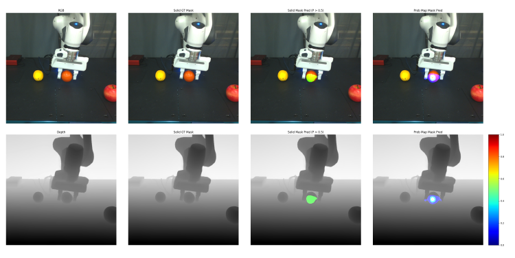
- Occlusion
Our model:
w/o audio:
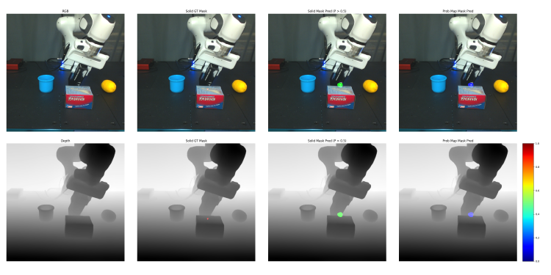
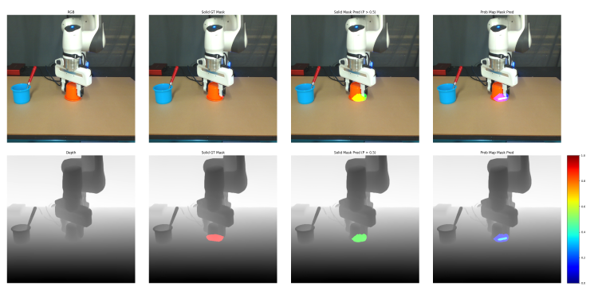
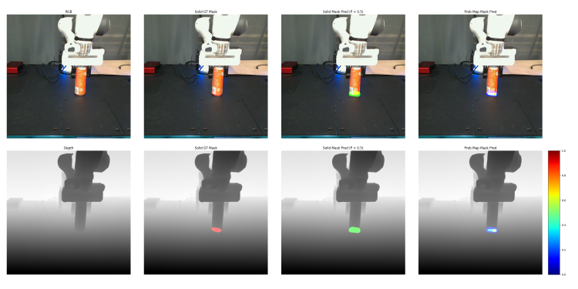
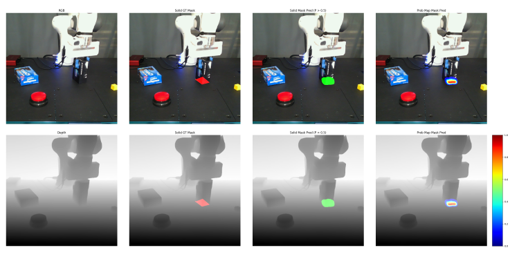
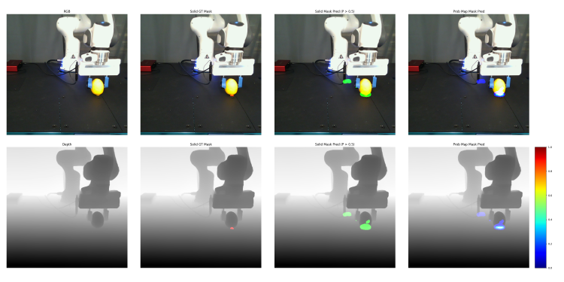
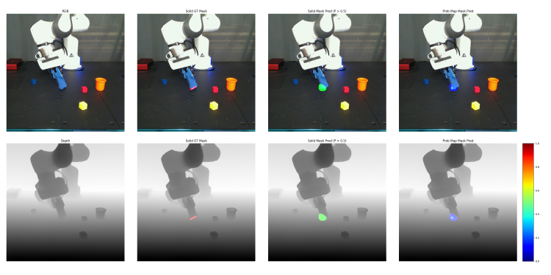
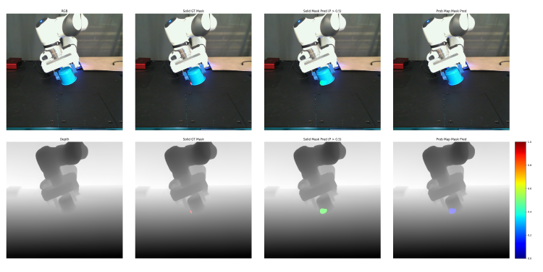
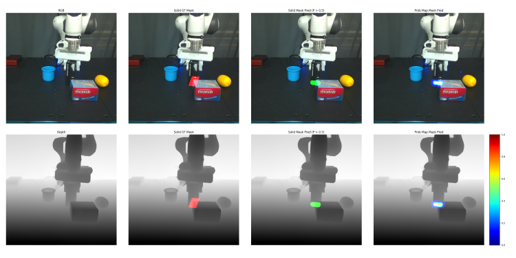
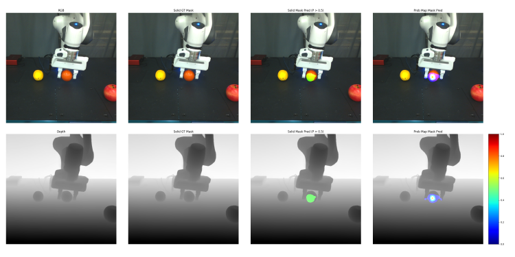
- Near contact
Our model:
w/o audio:
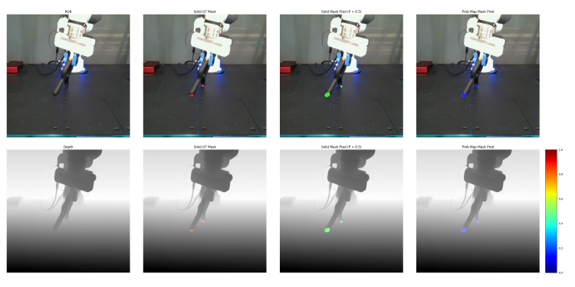
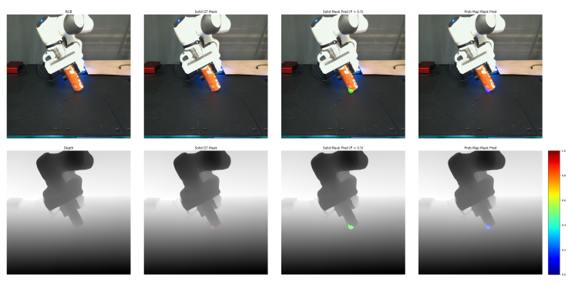
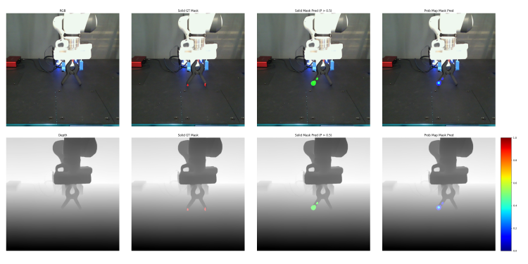
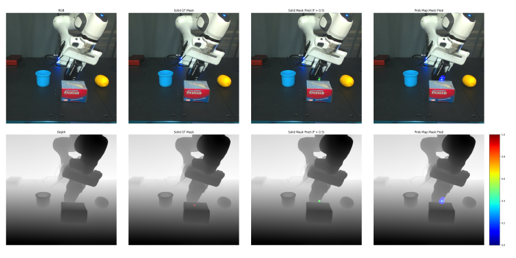
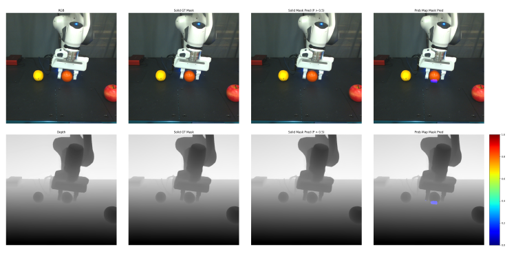
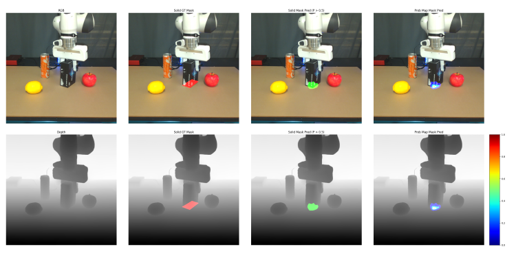
- Different surface
Our model:
w/o audio: